

 联系我们
联系我们

二、基本设计数据
工件:玩具车模外壳
产品规格:
Min::L340mm*W 190mm*H110mm
Max: L900mm*W500mm*H400mm
切削方式:ABBIRB2600机器人夹持主轴,驱动刀具对产品需要切除部分进行切割
喂料方式:人将两个料号的毛坯分别放到工作平台上
控制方式:利用高稳定性的PLC做总控,自动判断待加工或加工完成的产品,机器人或滑台一句判断对产品进行相应处理
三、系统工作流程
(1)将ABB IRB2600-12/1.85型机器人同电主轴及工作平台(治具)进行整合。
(2)1台机器人搭配2工作平台,*多可完成2个产品的同时加工,加工周期以40s/pcs产品计算。
(3)根据11/2沟通结果,机器人仅负责完成对车模外壳的切边作业(打孔及其他作业不在此范围内)。
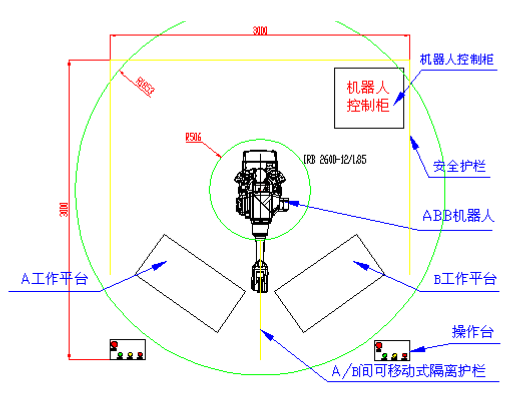
模型汇ABB IRB2600自动切割系统LAYOUT
模型汇ABB IRB2600自动切割系统L AYOUT工作流程如下:
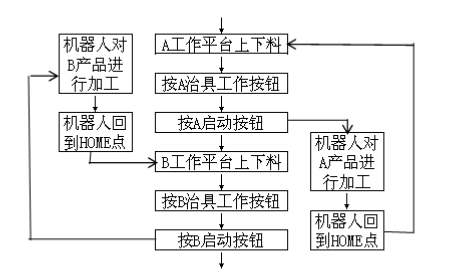
1) 人工将产品放置在A工作平台,上,并按“A治具工作按钮”,石膏内嵌吸盘会将产品吸附在石膏仿形治具上(保证切割/打孔时产品不移位) ;
2)操作人员推出机器人工作范围,按操作台上的A开始按钮;
3)机器人对A工作平台上的产品进行切边作业;
4)加工完成后, 机器人运行至HOME安全点,人工对其进行换料;
5) 当机器人正在对A工作平台上产品进行加工时,人工对B工作平台进行上下料。
四、主体设备
(1)机器人采用全球占有量第-的瑞典品牌ABB IRB2600-12/1.85型6轴机器人。ABB 机器人新型产品IRB 2600的诞生标志着ABB中型机器人家族的进一步壮大。
(2)主轴
此系统采用意大利全进口的电主轴为切削工具。该主轴*高转速可达到24000rpm,可通过人工的方式进行刀具的更换,配合塑料产品专用加刀具可快速有效的完成注塑件表面成型。
3)上下料滑台
为自行设计往返型滑台,滑台上可放置专用治具。人工在安全区域放料,滑台将待加工产
品送入机器人工作区域,确保作业人员安全。
(4)专用治具
针对产品专门开发石膏治具,内嵌真空吸盘,使产品贴合度良好,保证在加工过程中无位移。
(5)总控平台
在此处对治具、滑台、机器人进行控制,使机器人能够根据操作台的要求进行相应动作。
总控操作台作用如下:
机器人启动/暂停;
机器人急停;
治具工作;
五、压缩空气及电源
(1)压缩空气
压缩空气主要为机器人夹具及其它气动装置提供动力。
●压缩空气供应点的需求量要求:
动态压力6 bar
以上数字是指-一个空气柜的用气量,即一个机器人配一-台空气柜。
●压缩空气规格
空气压力:6 bar
露点:<+2°Cat6bar
颗粒大小:<5um
含油量:< 1ppm (<1mg/m3)
●压缩空气在供给时,直接从控制柜到机器人,输出端配有压力调节器、压力表和截止球阀。
3.5.2电源
电源规格:
Mains voltage: 380VAC, three-phase, five line, + 10%, -15% .
Mains fuse: Max. 25A
Mains frequency: 50 Hz
功耗
机器人(1台):ISO-Cube2.7 KW
机器人控制柜的电力供给(配电柜),每台机器人必须单独供电。
六、 IRB 2600-12/1.85机器人系统
1、机器人概述
本案选取的ABB IRB2600其主要特征如下:
(1)全新的紧凑型设计:使其在物料搬运、上下料以及弧焊应用中的工作范围得到*优化。
(2)具有同类产品中*高的**度及加速度,可确保高产量及低废品率从而提高生产率。
(3)灵活的安装方式:包括落地安装、斜置安装,壁挂安装,倒置安装以及支架安装,有助于减少占地
(4)面积以及增加设备的有效应用.壁挂式安装的表现尤为显著.这些特点使工作站的设计更具创意,
(5)并且优化了各种.工业领域及应用中的机器人占地面积。
- 下一篇:一种新型零售已悄悄来袭--新零售
- 上一篇:ABB协作机器人在更多领域的迅速发展
