

 联系我们
联系我们

ABB机器人RAPID中可以通过以下三种方式修改机器人加速度。
1. AccSet 50,50 表示机器人的加速度和加加速度(包括减速度和减减速度)均设置为50%
2. WorldAccLim On := 3.5;表示当前机器人的加速度和减速度*大值为3.5m/s2
WorldAccLim Off;表示当前机器人加速度恢复为默认
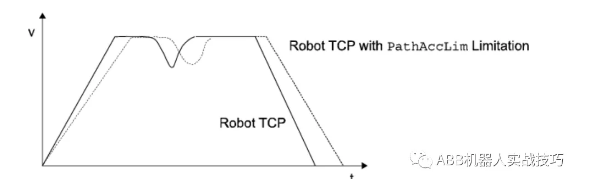
3. PathAccLim TRUE AccMax := 4, TRUE DecelMax := 3;表示当前机器人的加速度*大为4m/s2,减速度*大为3m/s2
PathAccLim TRUE AccMax := 4, FALSE;表示加速度*大为4m/s2,减速度默认
下图为使用加速度限制后,机器人加速时间变长,减速时间变长
二、ABB机器人理论*大速度
不同型号机器人理论*大直线速度不一。在使用运动语句时,可以直接使用vmax来使得机器人尽量达到该机器人能达到的*大速度。
MoveL p10,vmax,fine,tool0\WObj:=wobj1;
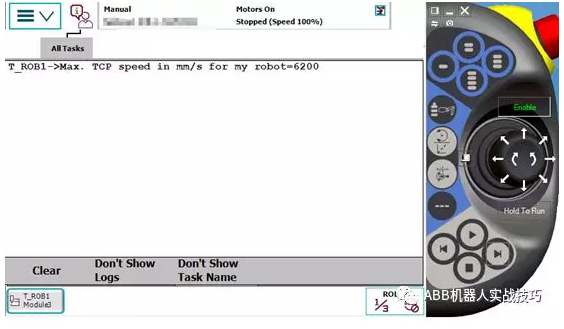
如何获取该机器人的理论*大直线速度?可以使用函数MaxRobSpeed()来获取。
在示教器插入如下代码,即可写屏显示机器人*大速度,如上图
TPWrite "Max. TCP speed in mm/s for myrobot="\Num:=MaxRobSpeed();
本文摘自 : 网络
ABB机器人配件
- 下一篇:数组参数怎样来编程?-ABB机器人
- 上一篇:ABB机器人干货-轮毂行业成功案例
